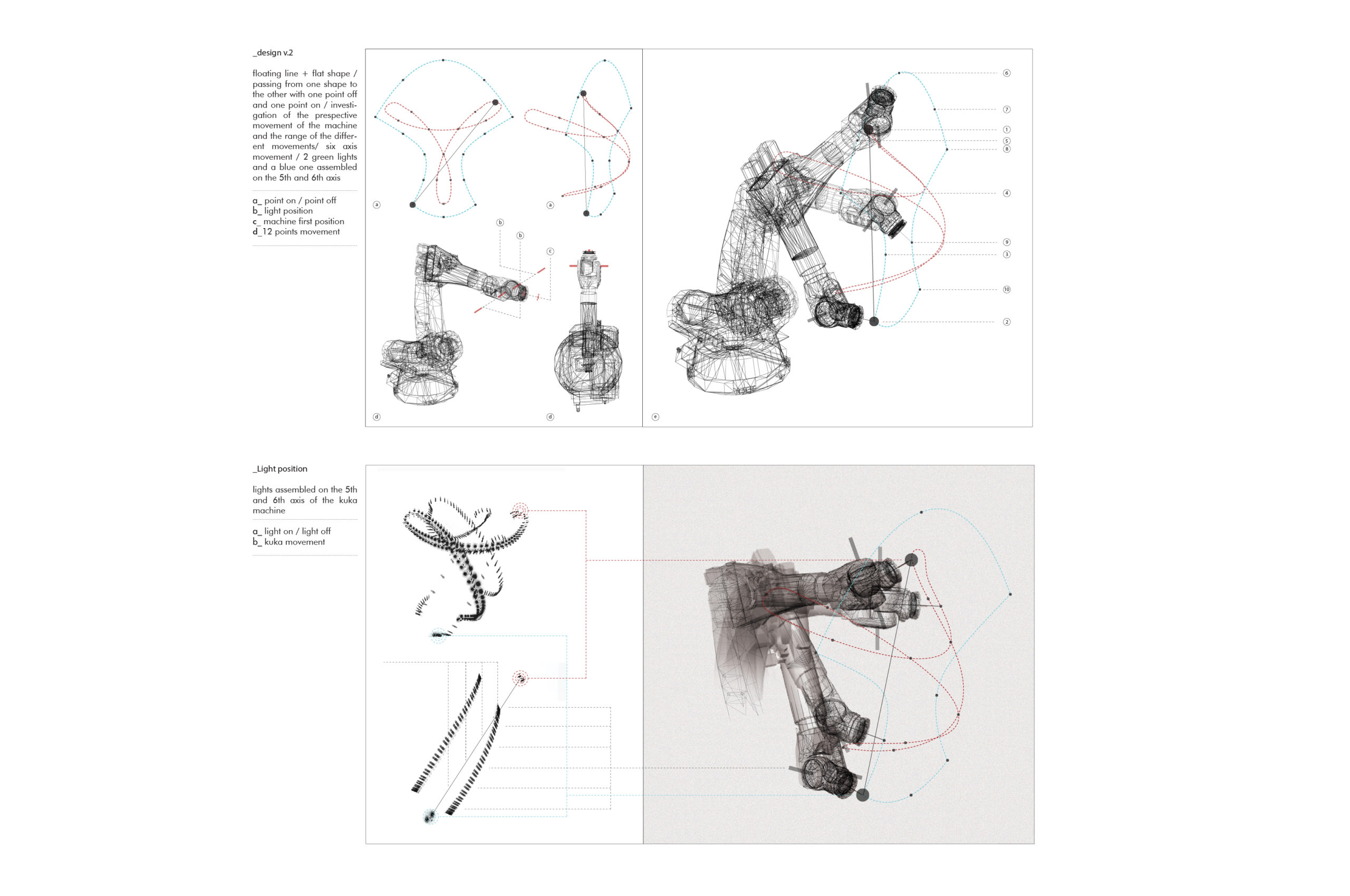
The experimental set up was the following:
_The robot was controlled via Grasshopper, through the use of the KUKA I Krc plug-in (from association for robots in architecture) for Grasshopper and Rhino. Each group did draw a series of parametric lines that would become the tool paths for the robot.
_A video simulation with the virtual robot in Grasshopper was performed to understand the behaviour of the machine along
the path and amend eventual errors; the video would allow also the testing of multiple path parameters and robot behavioural options.
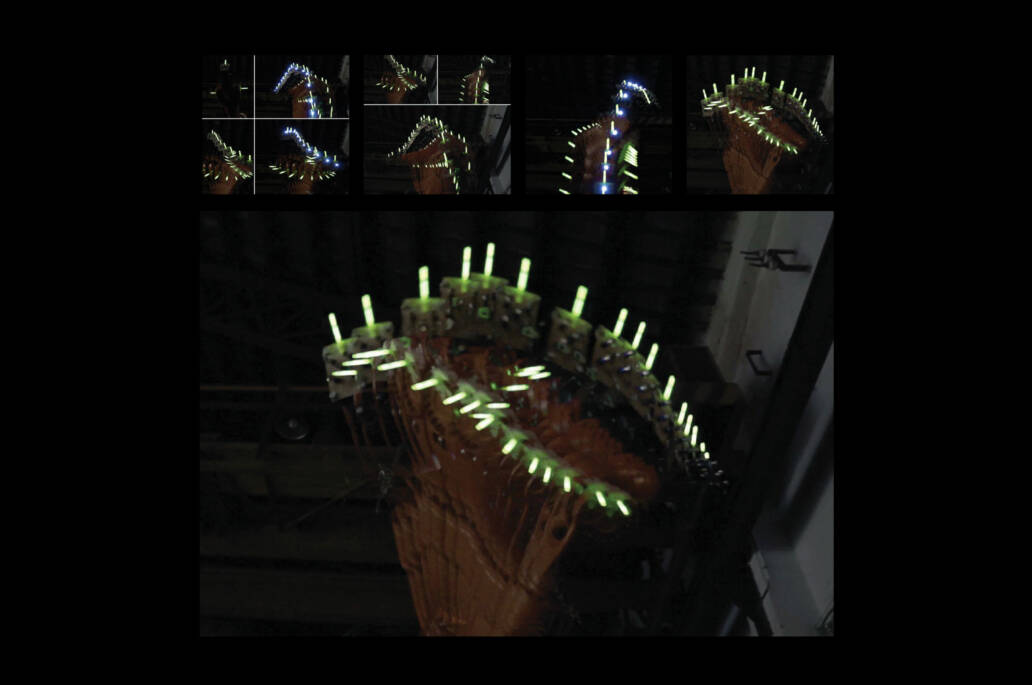
_The tool mounted on the robot contained 1 fixed LED light and 2 or 4 blinking ones; the blinking was also controlled via
Grasshopper and related to the robotic arm path.
_A camera was positioned in front of the robot and its exposure tuned to the particular lighting conditions and the length in
time of the tool path, Such configuration allowed capturing the ephemeral lighting traces left by the robotic arm movements.
The robotic behaviour is therefore translated into a 3D robotic light painting
ΤόποςΙnstitute of Advanced Architecture of Catalonia, ΒαρκελώνηΧρόνοςΑπριλ. _2013ΟμάδαNicollo Marini, George SoutosΣυνεργάτεςAlexander Dudor, Marco Polleto, Andrea BugliΕργασίαΈξυπνα Συστήματα, Οπτική Τέχνη
Χρησιμοποιούμε cookies για να σας προσφέρουμε την καλύτερη δυνατή εμπειρία στη σελίδα μας. Εάν συνεχίσετε να χρησιμοποιείτε τη σελίδα, θα υποθέσουμε πως είστε ικανοποιημένοι με αυτό.